带非线性项的积分器链嵌套饱和时滞控制
刘 俊
(1.湖南机电职业技术学院 信息工程学院,湖南 长沙 410151;
2.中南大学 自动化学院,湖南 长沙 410083)
1992 年A.R.Teel 对饱和控制做了开创性工作[1],后续国内外学者在饱和控制尤其是输入包含时滞方面做了大量的研究[2-15],至今仍然是控制领域的研究热点之一[16-19]。F.Mazenc 等[7-8]首次使用有界和时滞控制解决了多积分器系统的全局稳定问题。随后,这些成果被推广到前馈非线性系统。其整体思路是利用平面转换,构造标准型进行自然对消,完成饱和退化分析,解决了具有输入时滞的前馈系统全局稳定问题[9-12]。其中,Ye H.W.等[9]提出了一种新的由级联饱和函数组成的非线性控制器,Zhou B.等[6]提出了两种前馈非线性系统的有界时滞控制,包含级联饱和控制器和嵌套饱和控制器。
沿着文献[6]和[9]的思路,针对积分器链,本文提出了一种新的嵌套饱和时滞控制算法。与同类文献相较而言,本文与文献[9]的级联饱和控制不同,本文控制器为嵌套饱和控制,可以处理非线性高阶扰动和输入时滞;
相对于文献[6],本文所提出的控制器在系统状态和饱和函数前面都包含了乘性系数,因而具有更强的灵活性;
相对于文献[10-12],得益于系统状态和饱和函数都包含可调乘性系数,本文控制器可以处理输入包含较大时滞的情形。
本文首先针对带非线性项积分器链系统,设计坐标变换和控制器;
然后进行系统稳定性分析,包括饱和退化分析和退化后系统的渐进稳定分析;
最后通过对一个惯性摆实例进行仿真实验,验证所设计控制器的有效性。
带高阶非线性项的积分器链系统为
系统(1)满足假设1。
假设 1

针对系统(1)设计如下坐标转换:

式中:ki>0,λi>0,i=1,2,3,4。
则系统转换成:
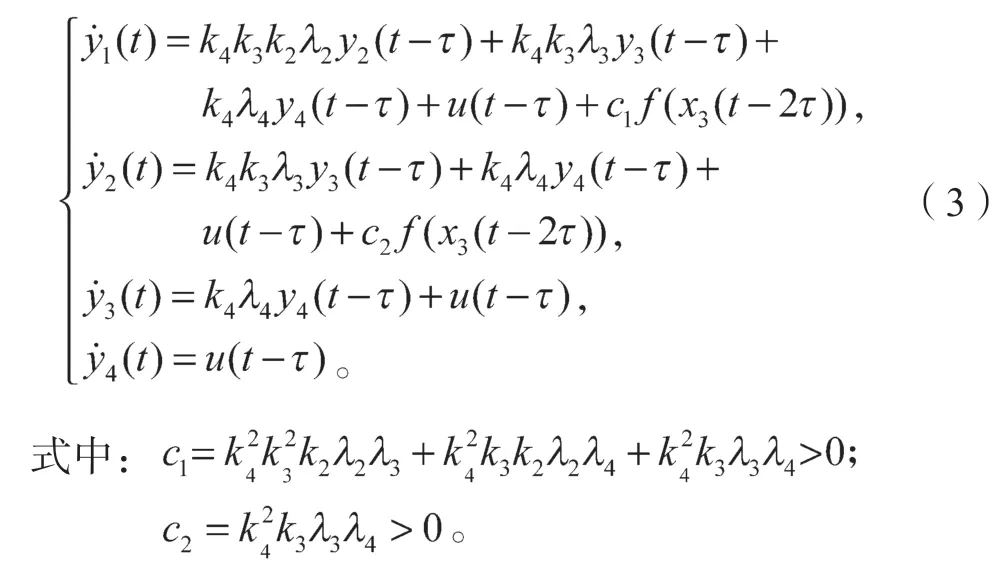
针对式(3),设计如下嵌套饱和控制器:

式中sat为标准饱和函数,且

其中ε为饱和度。
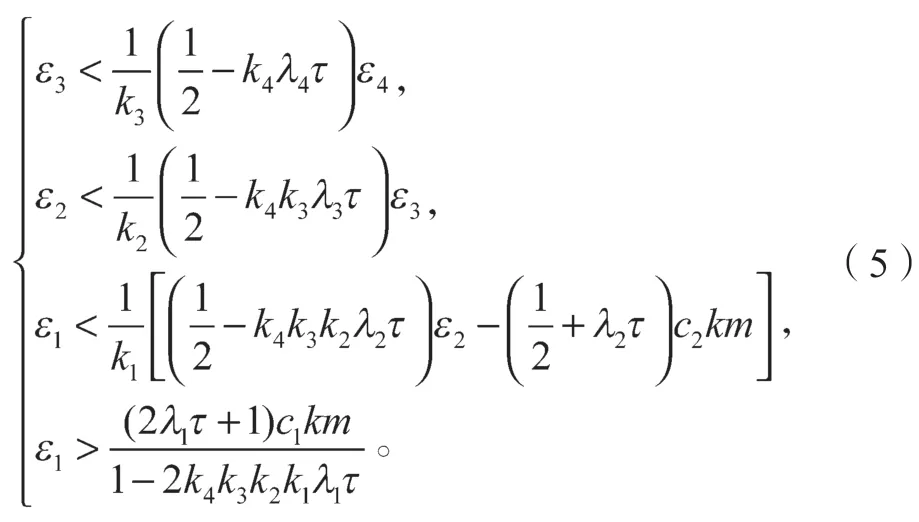
控制器(4)的参数满足如下条件(5):
引理1[6]设γ>0,ε>0,β1>0,β2>0 为4 个给定的数,考虑标量系统:

那么存在一个有限时间T>t0,满足

此外,v能被简化为

渐进稳定性分析分为饱和退化分析和退饱和系统的渐进稳定分析两个阶段。首先,针对控制器(4),利用平面转换构造标准型,进行自然对消,完成饱和退化分析;
然后,利用一个重要矩阵不等式和李雅普诺夫定理,完成渐进稳定性分析。
2.1 系统饱和退化分析
事实1在满足假设1 和条件(5)时,控制器(4)饱和退化。
证明分别考虑y4,y3,y2,y1子系统。
步骤1首先考虑y4子系统

式中t≥t0+τ。
将上式两边从t-τ到t积分,得

将其代入式(7),得

结合式(4)有

步骤2分析y3子系统,当t≥T4时:

将式(8)两边从t-τ到t积分,得

将其代入式(8),有
结合式(4)有
即y3子系统饱和退化。
步骤3分析y2子系统,当t≥T3时:
类似步骤1 和步骤2 的分析,在满足条件(5)时,y2子系统饱和退化。
步骤4分析y1子系统,当t≥T2时,

类似步骤1 和步骤2,由引理1,可知当满足条件(5)时,y1子系统饱和退化,证毕。
经上述4 个步骤后,系统(3)的状态进入区域:

2.2 退饱和系统渐进稳定分析
通过上述饱和退化分析,退化后的系统可以被表述为

式中:

因为c3(t)和c4(t)有界,可以假定:

根据牛顿-莱布尼茨公式,有

将其代入式(12)得到:

然后集中处理系统(16)。
定义矩阵:

和一个矩阵不等式:

注意到A是一个稳定矩阵,通过调节L和β,总是存在一个正定矩阵P满足不等式(18)。
假设 2

式中L、β在(17)(18)中给定;
P在(18)中定义。
事实2在假设2 前提下,系统(16)是渐进稳定的。
证明定义系统(16)的候选李雅普诺夫函数:

沿着系统(16)对V1(y)求导:

利用不等式

得到

由式(17)和(18),最终得到

根据事实1 和事实2,可得本文的重要结论:
定理1当假设1、假设2 和条件(5)满足时,系统(3)(4)全局渐进稳定。
注:本文提出的控制器参数条件较为简单,且可以同时在系统状态和饱和函数前配置系数,具有较大的灵活性。后续仿真实验说明控制器(4)可以处理较大时滞。
考虑惯性摆系统
式中τ>0 为输入时滞。

根据定理1 选择控制器(4)的参数。

最终得到系统(22)的控制器方程:
选取初始条件:

对系统(22)在控制器方程(23)下进行仿真实验得到的仿真结果如图1 所示。从图1 可以看出,在时滞较大的情形下,系统(22)在控制器方程(23)下依然可以全局渐进稳定,说明嵌套饱和时滞控制器(23)具有较好的鲁棒性。
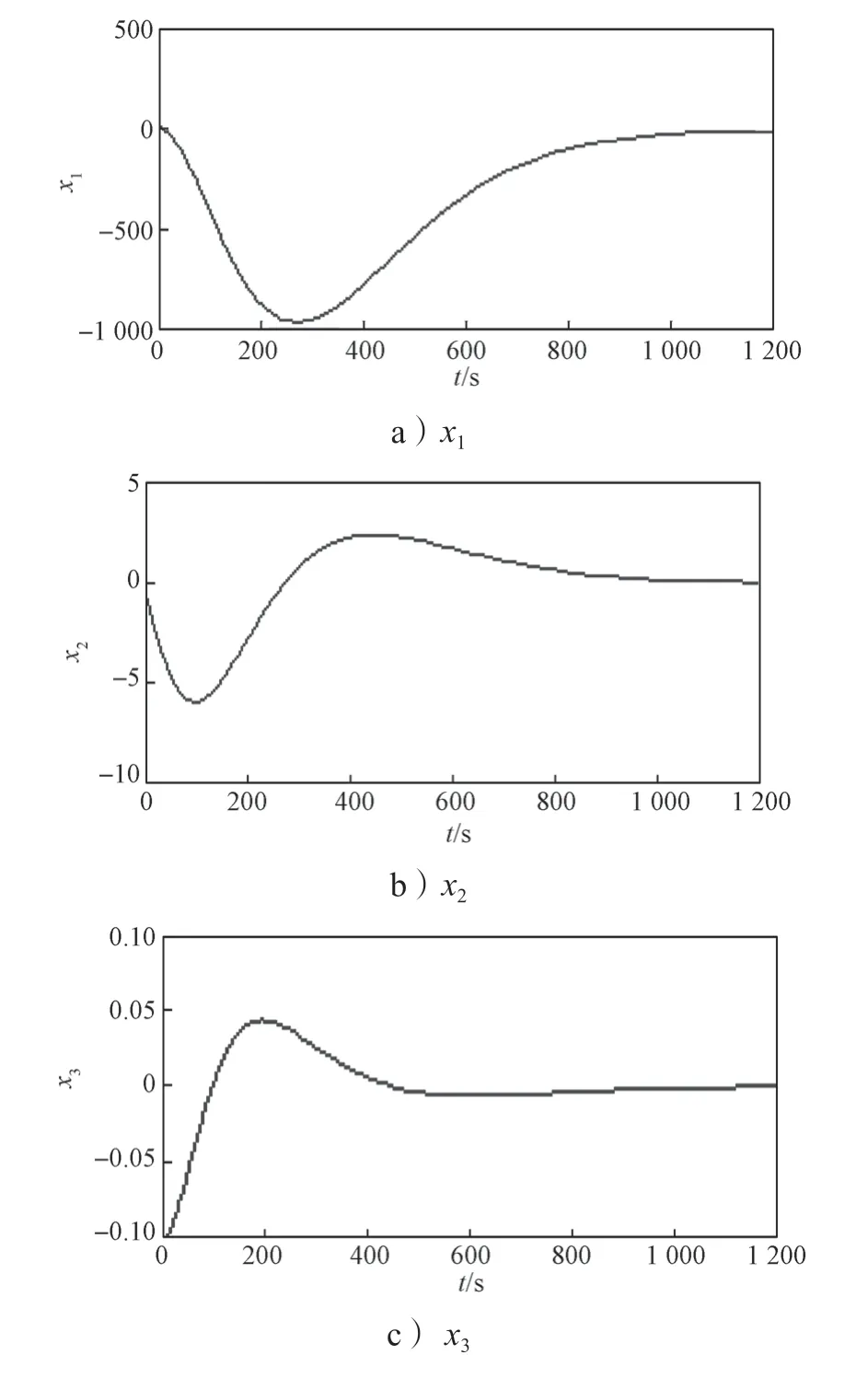
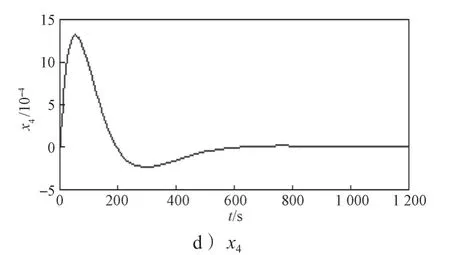
图1 系统(22)在控制器方程(23)下的系统状态轨迹Fig.1 System state trajectory of system(22)under controller(23)
本文提出了一种嵌套饱和时滞控制器,实现带高阶非线性项四阶积分器系统的全局渐进稳定。系统的稳定分析分为饱和退化分析和退饱和系统两个阶段。首先,利用平面转换构造标准型,进行自然对消,完成饱和退化分析;
然后,利用一个重要矩阵不等式和李雅普诺夫定理,完成渐进稳定分析。最后,通过一个惯性摆系统的仿真实验,验证了控制器的有效性。本文的控制器参数条件较为简单,可以同时在系统状态和饱和函数前配置乘性系数,能处理较大时滞,具备一定的工程价值。后续主要工作是把控制器推广到低阶前馈系统,并能处理状态系数不确定问题。
相关推荐: